Hardware
Afstand sensor
Voor mijn afstand sensor heb ik voor de HC-SR04 gekozen. Deze kan accuraat de afstand meten tot objecten voor de robot en is makkelijk om aan te sluiten op verschillende microcontrollers. Ook is deze sensor zeer bekend en vaak gebruikt, moest ik er een probleem mee hebben zal ik dus snel een oplossing kunnen vinden. De sensor moet aangesloten worden op 5V en gebruikt twee digitale pinnen voor de data.

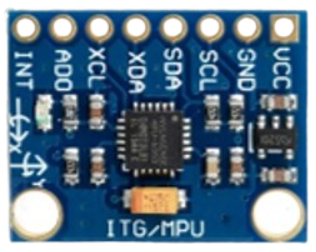
Gyro-sensor
Om te meten of mijn robot naar voor of achter kantelt gebruik ik een GY-521. Deze sensor meet accuraat en is makkelijk aan te sluiten vanwege het I²C protocol. Ook beschikt deze over een spanningsregulator, hierdoor kan hij gebruikt worden op zowel 3,3V als 5V. Deze gyro wordt dus aangesloten op de 5V van de microcontroller en gebruikt de sda en scl pinnen op de Arduino voor de data.
Voeding
Vanwege de compactheid wordt een 9V-batterij gebruikt als bron, deze kunnen met een 800mAh genoeg stroom leveren en zijn makkelijk op te laden. De batterij wordt aangesloten op twee buck-converters.
Aangezien de motoren en de Arduino geen 9V gebruiken moet deze spanning omlaag gebracht worden, hiervoor gebruik ik een buck-converter. Deze werkt a.d.h.v. een LM2596 voltage regulator. In de robot worden er twee gebruikt, één voor de Arduino die wordt ingesteld op 5V. En de andere op 6V voor de motoren die wordt aangesloten op de motor controller.

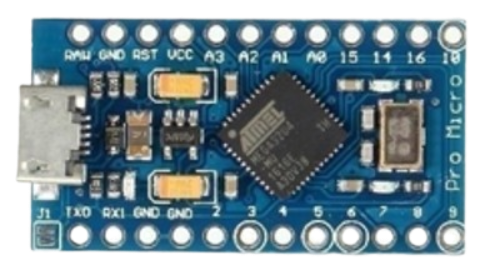
Microcontroller
Ik heb gekozen voor een Arduino Pro Micro vanwege het compacte design en deze had alle aansluitingen nodig voor de sensoren en motorcontroller. Ook heeft deze een usb aansluiting zodat hij makkelijk geprogrammeerd kan worden. Deze wordt aangesloten op de 5V spanning van de buck-converter.
DC-motoren
Om de wielen aan te drijven gebruik ik DC-motoren met een reductiekast, deze werken op een spanning van 0 tot 6V. Door de tandwielverhouding van 1:48 draaien ze op een goede snelheid voor de robot, ze hebben een koppel van 0,078 Nm en gebruiken gemiddeld 70mA max. 250mA.

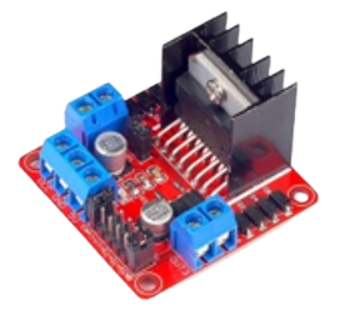
motorcontroller
Om deze motoren aan te drijven wordt er een motorcontroller gebruikt, deze werkt met een L298 H-brug. Deze heb ik gekozen omdat het ook een compacte component is en hij kan de 2 DC-motoren perfect aansturen a.d.h.v. een PWM signaal.
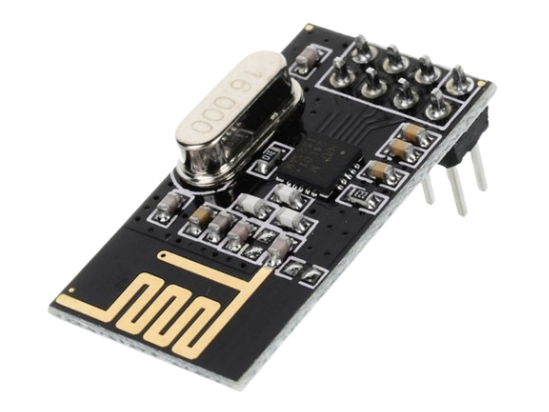
2.4GHz modules
Ik wou een draadloze verbinding tussen de controller en de robot, om deze te realiseren maak ik gebruik van de NRF24L01 module. Deze werken op dezelfde manier als een draadloze muis en geven een stabiele een snelle verbinding.
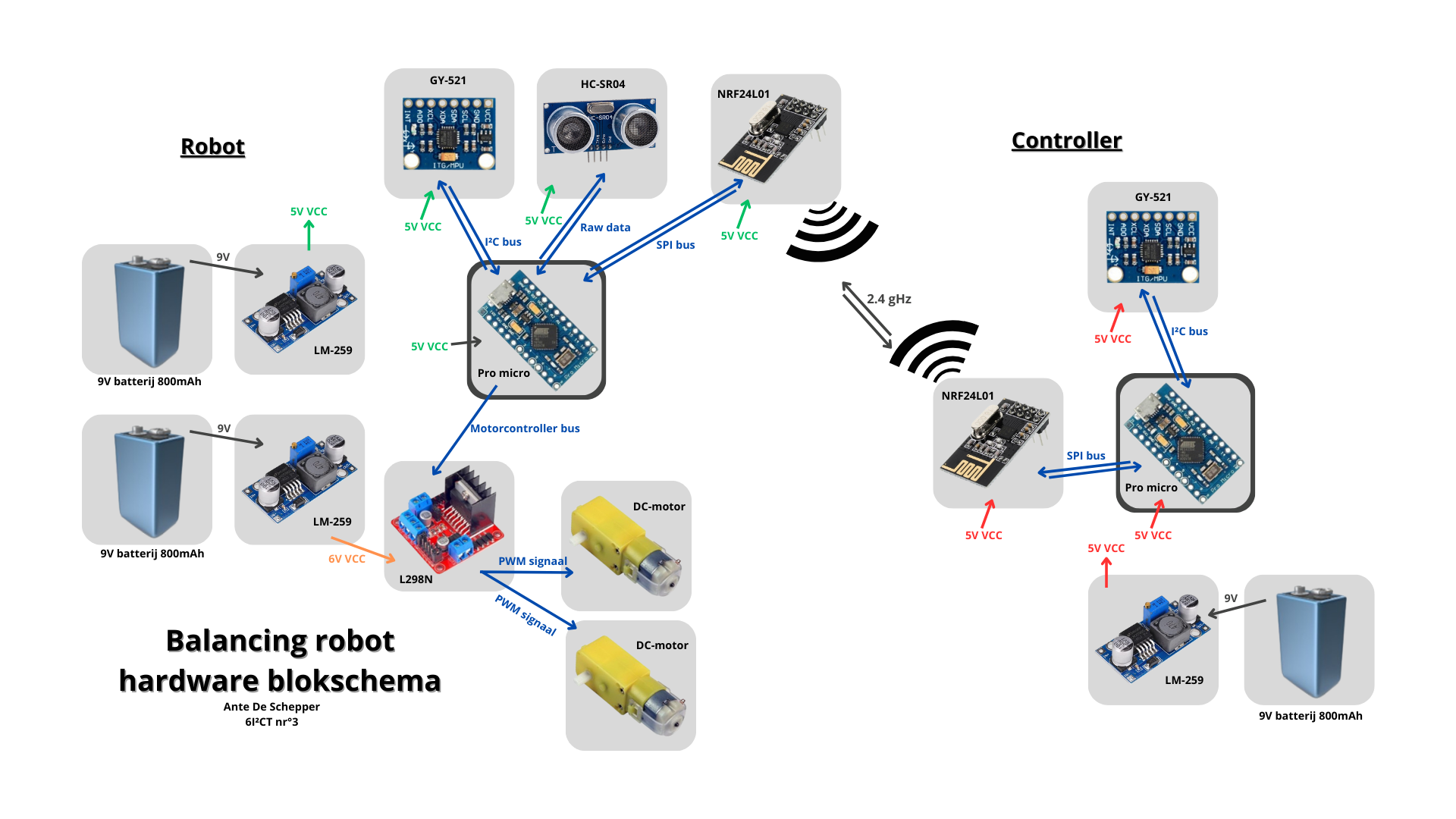
Hardwareblokschema